













恩智浦半導體(NXP Semiconductors)2022年初宣布推出兩款16奈米成像雷達處理器,針對L2至L5的自動駕駛需求所設計,並能使4D成像雷達進行360度環繞感測。後續也發表雷達信號處理演算法Premium Radar SDK(PRSDK),協助開發人員提升雷達系統效能。並積極與車用雷達廠商如昇達科合作,共同推動高階車用感測應用的發展。
成像雷達可擴展雷達的功能,從偵測大型物體,到透過高解析度點雲(Point Cloud)「監測」車輛環境,進而改善環境映射(Environmental Mapping)和場景理解(Scene Understanding)。恩智浦半導體副總裁暨ADAS產品線總經理Steffen Spannagel表示,透過這些影像,能區分易受傷害的道路使用者和車輛等物體,並運用至複雜的都市場景中,像是當摩托車靠近大型送貨卡車或兒童跑進停放汽車中間的道路時。此外,成像雷達需要能同步測量速度,並對最遠300公尺處超出人類視力範圍的物體進行分類,亦須識別快速移動的車輛,並將它們與駕駛路徑中較慢的車輛或甚至靜止障礙物(例如廢棄輪胎)區分開來。
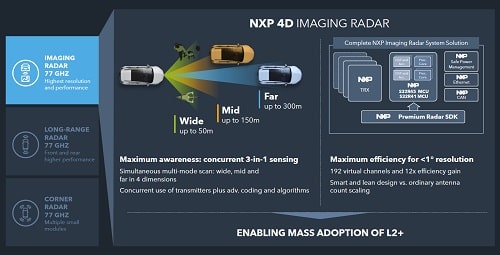
恩智浦的4D成像雷達是首款在短、中和遠距作業中同時提供三合一多模(Multi-mode)雷達感測的雷達,能同時感測汽車周圍非常寬廣的視野。Spannagel說明,為實現該目標,恩智浦運用192個虛擬天線通道組成低複雜度感測器配置,使效能超越原始的感測器硬體功能。主要是透過結合能使運算效能達到標準處理器64倍的專屬雷達硬體加速、可實現亞度角(Sub-degree)解析度的超解析度(Super-resolution)雷達軟體演算法,以及能同時操作天線通道的進階MIMO波形所實現。許多高解析度感測器,例如光學雷達(LiDAR)和高天線數巨量MIMO雷達,可能因成本和複雜度只能使用在狹隘的使用範圍內,而此架構將有助於克服其局限性。
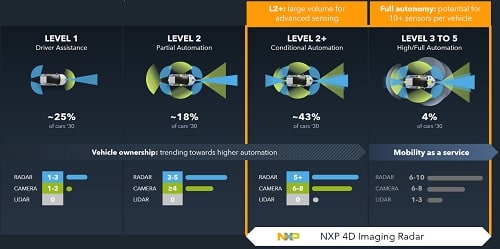
S32R41將成為L2等級以上自動駕駛應用量身打造的16奈米雷達處理器,產業分析師預測,到2030年該應用約可占汽車產量的50%。一般高解析度感測器無法完全滿足L2等級以上的應用需求,但現在將透過可提供最多六個角落、前後雷達感測器、360度環繞的4D成像雷達感測提供支援。
S32R45雷達處理器為恩智浦第六代汽車雷達晶片組系列的旗艦級產品,其有助於加速實現從L2至L5等級使用案例的自動駕駛,這些案例中每輛車需要的成像雷達感測器可能多達十個以上。此外,也適用於需要可靠高解析度感測的運輸、交通管理和其他工業應用。
此外,恩智浦的雷達信號處理演算法,可幫助開發人員提升雷達系統效能,運用演算法與其S32R4x雷達處理器系列的緊密耦合(Tight Coupling),提高安全性並差異化優勢。該專用的雷達演算法庫(Algorithm Library)允許將經過驗證的演算法快速整合至雷達感測器應用,幫助加快雷達感測器的開發並減少研發投資。Spannagel指出,該初始評估版預計將於2022年發布,版本包含三個演算法套裝軟體,其中的解決方案可實現抑制干擾、最佳化MIMO波形、增強角度解析度。
預計5年內,汽車所搭載的雷達感測器數量將是現在的兩倍之多,超過90%的雷達感測器將在相同的77~79GHz頻段工作。而對雷達間相互干擾的擔憂日益成長,採取抑制措施成為當務之急。與此同時,汽車製造商正在尋求有效提升感測器效能的方法。因此,改善的MIMO波形至關重要,其可以提高雷達感測器的解析度,擴大覆蓋範圍。這些特殊的調變方案(Modulation Scheme)允許更多發射器同時工作,透過對各個發射天線信號進行編碼,確保能夠在接收端將其區分。此外,為了在弱勢道路使用者(Vulnerable Road User)偵測或停車輔助功能等使用案例,支援更準確的目標區分和分類,轉角雷達(Corner Radar)以及前置雷達(Front Radar)應用都需要更高解析度的感測器。
NXP同時與為昇科(Cubtek)科技合作,開發4D影像雷達,所謂4D就包括速度、距離、水平與垂直角度感測,其感測訊息同時包括這四個資料,為昇科科技技術長蔡青翰解釋,該公司與NXP合作的4D成像雷達,最高採用四組3T4R的收發器,共12T16R創造192個通道,有助於解析度的提升,其角分辨率低於1度,感測距離大於300公尺,輸出資料速率達20FPS,每秒產生8萬點雲資訊,並透過AI辨識目標。





